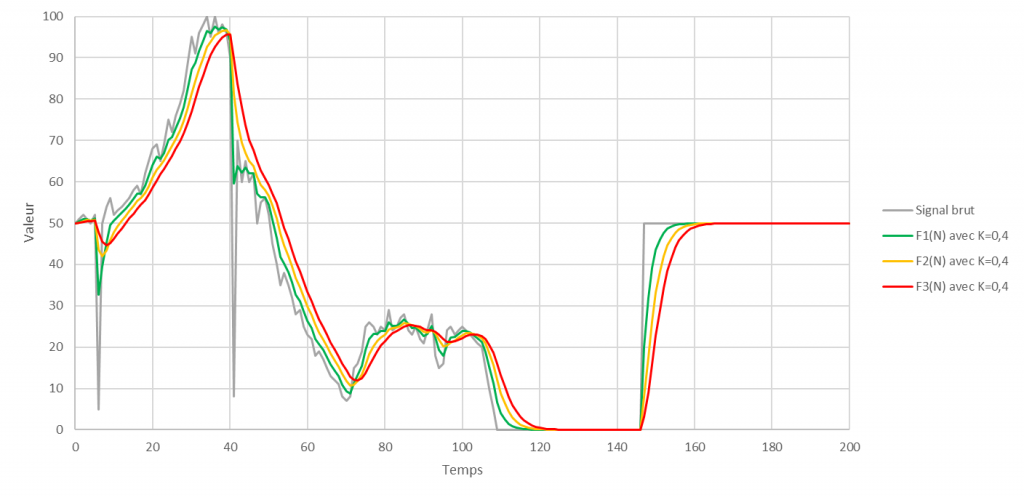
Ici, il ne s’agit pas d’une nouvelle méthode mais d’une astuce. Comme avec des circuits électriques RLC, il est possible d’utiliser des combinaisons de filtres en série et en parallèle.
Par exemple, une cascade (enchaînement en série) de filtres, permet d’obtenir des résultats très intéressants.
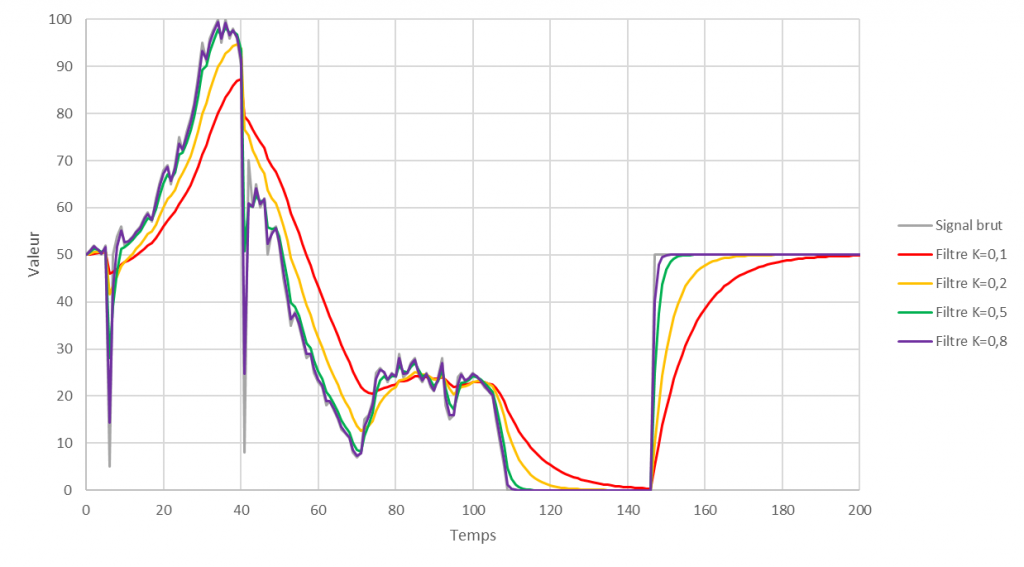
Prenons l’exemple de la première méthode utilisant le coefficient $K$.
En appliquant un premier filtre $F_1$ à la mesure M on obtient :
$ F_1(N) = (1-K) . F_1(N-1) + K . M(N) $
A ce premier résultat, on applique à nouveau le même filtre ($K$ identique pour chaque filtre). On obtient donc le système d’équation :
$ \begin{cases} F_1(N) &= (1-K) . F_1(N-1) + K . M(N) \\ F_2(N) &= (1-K) . F_2(N-1) + K . \textbf{F_1(N)} \end{cases} $
Qui se simplifie en une équation :
$F_2(N) = (1-K) . F_2(N-1) + (K-K²) . F_1(N-1) + K² . M(N)$
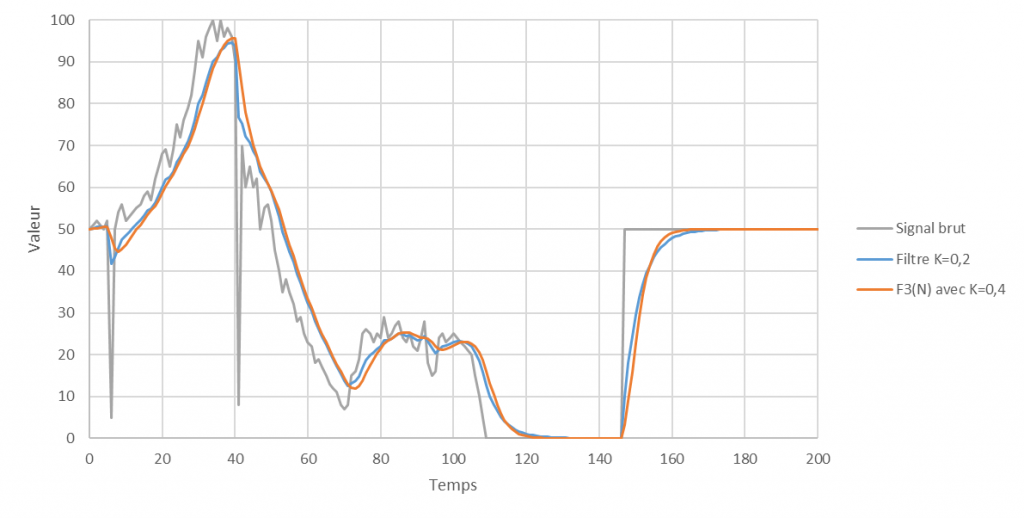
Cette équation peut se généraliser à $i$ filtres en cascade :
$F_i(N) = \displaystyle\sum_{j=0}^{i-1} \textcolor{red}{(K^j-K^{j+1}).F_{i-j}(N-1)} + \textcolor{green}{K^i.M(N)}$
Cette dernière équation signifie que, plus le nombre de filtres en série est important (plus $i$ est grand), moins la valeur de la mesure à l’instant $N$ ($\color{green}M(N)$) impacte la valeur filtrée ($F_i(N)$). En effet, pour $0<K<1$, la valeur de $\color{green}K^i$ décroit quand $i$ croit.